ການເພີ່ມປະສິດທິພາບກັບ MPU-6050: ການຕັ້ງຄ່າ, ການສອບທຽບ, ແລະຄໍາຮ້ອງສະຫມັກ
2024-04-25
9220
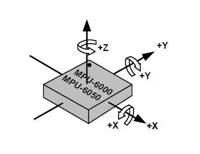
MPU-6050 ແມ່ນສ່ວນປະກອບໃນການປຸງແຕ່ງ Motion Motion ທີ່ປະສົມປະສານຄັ້ງທໍາອິດຂອງໂລກຄັ້ງທໍາອິດ, ເຊິ່ງປະສົມປະສານ gyroscope 3 ແກນ, ໂປເຊດເຊີ 3 ແກນແລະໂປເຊດເຊີດິຈິຕອນຂະຫນາດ 3 ແກນ (DMP).ຈຸດປະສົງຂອງການໃຊ້ມັນແມ່ນເພື່ອໃຫ້ໄດ້ມຸມມອງຂອງວັດຖຸທີ່ຕ້ອງວັດແທກ (ເຊັ່ນ: ລົດ quadcopter, ax, y, ນັ້ນແມ່ນມຸມ, ມຸມມ້ວນແລະມຸມມ້ວນ.ພວກເຮົາອ່ານຂໍ້ມູນຫົກຢ່າງຂອງ MPU-6050 (AD Axis Protolle ມູນຄ່າການກວດສອບສາມແກນແລະມີມູນຄ່າການໂຄສະນາໄວສາມແກນ) ຜ່ານອິນເຕີເຟດ I2C.ຫຼັງຈາກການປະມວນຜົນການປະສົມປະສານ, ສະຫນາມ, ມ້ວນ, ແລະມຸມ Yaw ສາມາດຄິດໄລ່ໄດ້.ໃນຖານະເປັນເອກະສານອ້າງອີງທິດທາງການວັດແທກ, ຄໍານິຍາມຂອງທິດທາງການປະສານງານຂອງ Sensorແກນນິ້ວມືຊີ້ໃຫ້ເຫັນໃນທິດທາງທີ່ດີຂອງແກນ y, ແລະນິ້ວກາງຊີ້ໄປໃນທິດທາງບວກຂອງແກນ z-axis.
ລາຍການ
ດ້ວຍລົດເມ i2C Sensor ທີ່ອຸທິດຕົນຂອງມັນ, MPU-6050 ແມ່ນສາມາດໄດ້ຮັບການປ້ອນຂໍ້ມູນໂດຍກົງຈາກເຂັມທິດ 3 ແກນພາຍນອກ, ສະຫນອງຜົນຜະລິດ.ມັນລົບລ້າງບັນຫາຄວາມແຕກຕ່າງລະຫວ່າງໄລຍະເວລາ gyroscopator ແລະເລັ່ງດ່ວນແລະຫຼຸດຜ່ອນພື້ນທີ່ການຫຸ້ມຫໍ່ຢ່າງຫຼວງຫຼາຍເມື່ອທຽບໃສ່ກັບວິທີແກ້ໄຂທີ່ຫຼາກຫຼາຍ.ໃນເວລາທີ່ເຊື່ອມຕໍ່ກັບ magnetometer ສາມແກນ, the mpu-60x0 ມີຄວາມສາມາດໃຫ້ຜົນຜະລິດ fusion motion motion ທີ່ເຕັມໄປດ້ວຍ I2C ຫຼື SPI (ໃຫ້ສັງເກດວ່າ Port SPI (6000).
ທາງເລືອກແລະທຽບເທົ່າ
- MPU-3300
- MPU-6000
- MPU-6500
ຜູ້ຜະລິດ MPU-6050
ຜູ້ຜະລິດ MPU-6050 ແມ່ນ TDK.ຫຼັງຈາກທີ່ຜູ້ກໍ່ຕັ້ງສອງຄົນຂອງ TDK, ທ່ານດຣ Yogoro Kato ແລະ Takei Takei, ໄດ້ປະດິດຂື້ນທີ່ບໍ່ມີຕົວຕົນໃນໂຕກຽວ, ພວກເຂົາກໍ່ຕັ້ງໂຕກຽວ.ໃນປີ 1935. ໃນຖານະທີ່ເປັນຍີ່ຫໍ້ອຸດສາຫະກໍາເອເລັກໂຕຣນິກອີເລັກໂທຣນິກ, TDK ໄດ້ຮັບການຮັກສາຕໍາແຫນ່ງທີ່ໂດດເດັ່ນໃນຂົງເຂດວັດຖຸດິບອີເລັກໂທຣນິກແລະສ່ວນປະກອບອີເລັກໂທຣນິກ.ຜະລິດຕະພັນທີ່ມີຄວາມຊໍານິຊໍານານແລະປະດິດສ້າງຂອງ TDKເຄືອຂ່າຍສະມາທິແລະ memnic ແລະອື່ນໆໃນນອກຈາກນັ້ນ, TDK ຍັງໃຫ້ການສະຫນອງພະລັງງານແລະອຸປະກອນພະລັງງານ, ຫົວຫນ້າແມ່ເຫຼັກແລະຜະລິດຕະພັນອື່ນໆ.ຍີ່ຫໍ້ຜະລິດຕະພັນຂອງມັນປະກອບມີ TDK, epcos, sampse, micronas, tronics ແລະ tdk-lambda.
ແຜນວາດຕັນພາຍໃນຂອງ MPU-6050
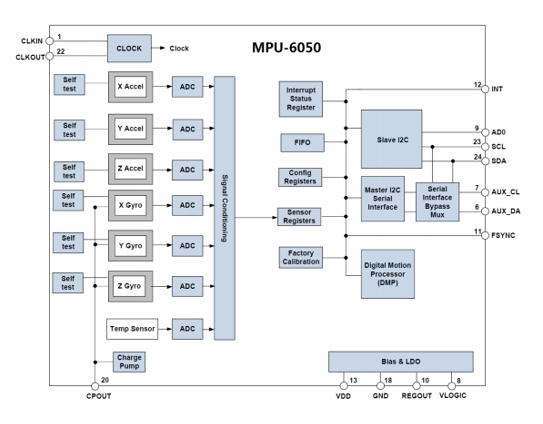
ໃນບັນດາພວກມັນ, SDA ແລະ SDA ແມ່ນການໂຕ້ຕອບຂອງ IIC ເຊື່ອມຕໍ່ກັບ MCCU, ແລະ MCU ຄວບຄຸມ MPU-6050 ຜ່ານອິນເຕີເຟດ IIC.ນອກນັ້ນຍັງມີການໂຕ້ຕອບຂອງ IIC, ຄື AUX_CL ແລະ AUX_DA.ອິນເຕີເຟດນີ້ສາມາດຖືກນໍາໃຊ້ເພື່ອເຊື່ອມຕໍ່ອຸປະກອນທີ່ໃຊ້ພາຍນອກ, ເຊັ່ນ: ແກັບແມ່ເຫຼັກ, ເພື່ອປະກອບເປັນເຊັນເຊີເກົ້າແກນ.Vlogic ແມ່ນແຮງດັນໄຟຟ້າ IO.ລະຫັດ PIN ນີ້ສາມາດສະຫນັບສະຫນູນຢ່າງຫນ້ອຍ 1.8V.ພວກເຮົາມັກຈະເຊື່ອມຕໍ່ມັນໂດຍກົງກັບ VDD.AD0 ແມ່ນ PIN ຄວບຄຸມທີ່ຢູ່ຂອງອິນເຕີເຟດດ້ານ IAIC (ເຊື່ອມຕໍ່ກັບ MCU).PIN ນີ້ຄວບຄຸມທີ່ຢູ່ IIC ຕໍ່າສຸດຂອງ IIC.ຖ້າມັນເຊື່ອມຕໍ່ກັບ GND, ທີ່ຢູ່ IIC ຂອງ MPU-6050 ແມ່ນ 0x68;ຖ້າມັນເຊື່ອມຕໍ່ກັບ VDD, ມັນແມ່ນ 0x69.ກະລຸນາຮັບຊາບວ່າທີ່ຢູ່ນີ້ບໍ່ໄດ້ລວມເອົາການສົ່ງຕໍ່ຂໍ້ມູນຕ່ໍາທີ່ສຸດ (ສ່ວນຕ່ໍາສຸດແມ່ນໃຊ້ເພື່ອເປັນຕົວແທນຂອງການປະຕິບັດງານທີ່ອ່ານແລະຂຽນ).ໃນ MwbalanceDC15, AD0 ແມ່ນເຊື່ອມຕໍ່ກັບ GND, ດັ່ງນັ້ນທີ່ຢູ່ IIC ຂອງ MPU-6050 ແມ່ນ 0x68 (ຍົກເວັ້ນການບິດທີ່ຕໍ່າທີ່ສຸດ).
ເລີ່ມຕົ້ນການໂຕ້ຕອບ IIC
MPU-6050 ໃຊ້ IIC ເພື່ອຕິດຕໍ່ກັບ STC15, ສະນັ້ນພວກເຮົາຕ້ອງການເລີ່ມຕົ້ນສາຍ SDA-6050 ທີ່ເຊື່ອມຕໍ່ກັບ MPU-6050 ກ່ອນ.
ຕັ້ງຄ່າ MPU-6050
ຂັ້ນຕອນນີ້ຟື້ນຟູຜູ້ໃຫ້ບໍລິການທັງຫມົດພາຍໃນ MPU-6050 ເຖິງຄ່າເລີ່ມຕົ້ນຂອງພວກເຂົາ, ເຊິ່ງບັນລຸໄດ້ໂດຍການຂຽນ 1 ເຖິງ Bit7 ຂອງການບໍລິຫານພະລັງງານລົງທະບຽນ 1 (0x6b).ຫຼັງຈາກການຕັ້ງຄ່າໃຫມ່, ການລົງທະບຽນການບໍລິຫານພະລັງງານ 1 ຈະໄດ້ຮັບການຟື້ນຟູໃຫ້ກັບມູນຄ່າເລີ່ມຕົ້ນ (0x40), ແລະລົງທະບຽນຄັ້ງນີ້ຕ້ອງຕື່ນຕົວ MPU-6050 ແລະເອົາລົງໃນລັດທີ່ເຮັດວຽກປົກກະຕິ.
ກໍານົດລະດັບລະດັບເຕັມຂອງເຊັນເຊີ velocity Agular (Gyro) ແລະເຊັນເຊີເລັ່ງ
ໃນຂັ້ນຕອນນີ້, ພວກເຮົາໄດ້ກໍານົດລະດັບເຕັມຂະຫນາດ (FSR) ຂອງການລົງທະບຽນສອງຄັ້ງຜ່ານການລົງທະບຽນການຕັ້ງຄ່າ gyroscope (0x1b) ແລະລົງທະບຽນການຕັ້ງຄ່າເຊັນເຊີ (0x1C) ຕາມລໍາດັບ.ໂດຍປົກກະຕິ, ພວກເຮົາກໍານົດລະດັບເຕັມຂອງ gyroscope ໃຫ້ກັບ± 2000dps ແລະລະດັບເຕັມຂອງ acceleromemeter ເປັນ± 2g.
ຕັ້ງຄ່າພາລາມິເຕີອື່ນໆ
ຢູ່ທີ່ນີ້, ພວກເຮົາຍັງຕ້ອງໄດ້ກໍານົດຕົວກໍານົດດັ່ງຕໍ່ໄປນີ້: ປິດການໂຕ້ຕອບ, ປິດການໂຕ້ຕອບ AUX I2C, ກໍານົດອັດຕາການເກັບຕົວຢ່າງຂອງ Gyroscope, ແລະກໍານົດຕົວກອງຜ່ານ LIGHINCE (DLPF).ເນື່ອງຈາກວ່າພວກເຮົາບໍ່ໃຊ້ການຂັດຂວາງໃນການອ່ານຂໍ້ມູນໃນບົດນີ້, ຫນ້າທີ່ການຂັດຂວາງຕ້ອງໄດ້ປິດ.ໃນເວລາດຽວກັນ, ຍ້ອນວ່າພວກເຮົາບໍ່ໄດ້ໃຊ້ອິນເຕີເຟດ AUX I2C ເພື່ອເຊື່ອມຕໍ່ແກັບອິນເຕີເນັດພາຍນອກອື່ນໆ, ພວກເຮົາຍັງຕ້ອງປິດການໂຕ້ຕອບນີ້.ຫນ້າທີ່ເຫຼົ່ານີ້ສາມາດຄວບຄຸມໄດ້ຜ່ານການຂັດຂວາງໄດ້ເປີດໃຊ້ງານລົງທະບຽນ (0x38) ແລະລົງທະບຽນຄວບຄຸມຜູ້ໃຊ້ (0x6A).MPU-6050 ສາມາດໃຊ້ FIFO ເພື່ອເກັບຂໍ້ມູນເຊັນເຊີ, ແຕ່ພວກເຮົາບໍ່ໄດ້ໃຊ້ມັນໃນບົດນີ້, ສະນັ້ນທຸກຊ່ອງທາງ FIOO ຕ້ອງຖືກປິດ.ສິ່ງນີ້ສາມາດຄວບຄຸມໄດ້ຜ່ານ FIFO ເປີດໃຊ້ງານລົງທະບຽນ (0x23).ໂດຍຄ່າເລີ່ມຕົ້ນ, ມູນຄ່າຂອງການລົງທະບຽນນີ້ແມ່ນ 0 (ນັ້ນແມ່ນ, FIFO ຖືກປິດໃຊ້ງານ), ດັ່ງນັ້ນພວກເຮົາສາມາດໃຊ້ຄ່າເລີ່ມຕົ້ນໂດຍກົງ.ອັດຕາການເກັບຕົວຢ່າງຂອງ gyroscope ແມ່ນຖືກຄວບຄຸມໂດຍອັດຕາການເກັບຕົວຢ່າງທີ່ລົງທະບຽນ (0x19).ໂດຍປົກກະຕິ, ພວກເຮົາໄດ້ກໍານົດອັດຕາການເກັບຕົວຢ່າງນີ້ໃຫ້ເປັນ 50. ການຕັ້ງຄ່າຂອງຕົວກອງຜ່ານຕ່ໍາດິຈິຕອນ (DLPF) ແມ່ນສໍາເລັດຜ່ານການລົງທະບຽນການຕັ້ງຄ່າ (0x1,a).ໂດຍທົ່ວໄປແລ້ວການປາກເວົ້າ, ພວກເຮົາຈະກໍານົດ DLPF ເຖິງເຄິ່ງຫນຶ່ງຂອງແບນວິດເພື່ອດຸ່ນດ່ຽງຄວາມຖືກຕ້ອງແລະຄວາມໄວຕອບຂອງຂໍ້ມູນ.
ຕັ້ງຄ່າແຫຼ່ງໂມງຂອງລະບົບແລະເຮັດໃຫ້ມີເຊັນເຊີຄວາມໄວໃນມຸມແລະເຊັນເຊີ
ການຕັ້ງຄ່າຂອງລະບົບໂມງຂອງລະບົບແມ່ນຂື້ນກັບການລົງທະບຽນການຄຸ້ມຄອງພະລັງງານ 1 (0x6b), ບ່ອນທີ່ມີການລົງທະບຽນຕໍ່າສຸດຂອງການເລືອກແຫຼ່ງທີ່ມາ.ໂດຍຄ່າເລີ່ມຕົ້ນ, ຖັງສາມຢ່າງນີ້ແມ່ນຖືກກໍານົດໃຫ້ 0, ເຊິ່ງຫມາຍຄວາມວ່າລະບົບໃຊ້ oscillator 8mhz RC ໃນຖານະເປັນເວລາ.ເຖິງຢ່າງໃດກໍ່ຕາມ, ເພື່ອປັບປຸງຄວາມຖືກຕ້ອງຂອງໂມງ, ພວກເຮົາມັກຈະຕັ້ງມັນໃຫ້ເປັນ 1 ແລະເລືອກ Pyroscope X-Axis Perroscope ເປັນ PLLOW.ນອກຈາກນັ້ນ, ເຮັດໃຫ້ແກັບໄວທີ່ມີມຸມແລະເຊັນເຊີໃນມຸມກໍ່ຍັງເປັນບາດກ້າວທີ່ສໍາຄັນໃນຂະບວນການເລີ່ມຕົ້ນ.ການປະຕິບັດງານທັງສອງໄດ້ຖືກຈັດຕັ້ງປະຕິບັດໂດຍຜ່ານການລົງທະບຽນການບໍລິຫານພະລັງງານ 2 (0x6c).ພຽງແຕ່ຕັ້ງປຸ່ມທີ່ສອດຄ້ອງກັນກັບ 0 ເພື່ອເປີດໃຊ້ແກັບທີ່ສອດຄ້ອງກັນ.ຫຼັງຈາກສໍາເລັດຂັ້ນຕອນຂ້າງເທິງ, MPU-6050 ສາມາດໃສ່ສະຖານະການເຮັດວຽກປົກກະຕິ.ຜູ້ລົງທະບຽນຜູ້ທີ່ບໍ່ໄດ້ກໍານົດໂດຍສະເພາະແມ່ນຈະຮັບຮອງເອົາຄ່າເລີ່ມຕົ້ນຂອງລະບົບໂດຍລະບົບ.
ເຮັດວຽກ MPU-6050 ເຮັດແນວໃດ?
ແກັສ Gyro
ເຊັນເຊີໄດ້ຖືກຕິດຕັ້ງດ້ວຍ gyro ພາຍໃນ, ເຊິ່ງສະເຫມີຈະມີຂະຫນານກັບທິດທາງໃນເບື້ອງຕົ້ນເນື່ອງຈາກຜົນກະທົບ gyroscopic.ເພາະສະນັ້ນ, ພວກເຮົາສາມາດຄິດໄລ່ທິດທາງແລະມຸມຂອງການຫມູນວຽນໂດຍການກວດພົບຄວາມບ່ຽງເບນຂອງ gyro ຈາກທິດທາງເບື້ອງຕົ້ນ.
ເຊັນເຊີ purelerometer
ເຊັນເຊີ Accelerometer ແມ່ນອຸປະກອນທີ່ສາມາດວັດເລັ່ງແລະມັນເຮັດວຽກໂດຍອີງໃສ່ຫຼັກການຂອງຜົນກະທົບ piezoelectric.ໃນລະຫວ່າງການເລັ່ງ, ເຊັນເຊີໄດ້ວັດແທກຄວາມບໍ່ມີຕົວຕົນທີ່ໃຊ້ກັບທ່ອນໄມ້ມະຫາຊົນແລະຫຼັງຈາກນັ້ນຄິດໄລ່ມູນຄ່າການໃຊ້ເວລາທີສອງຂອງ Newton.
ໂປເຊດເຊີດິຈິຕອນດິຈິຕອລ (DMP)
ໂມດູນການປຸງແຕ່ງຂໍ້ມູນໃນ MPU6050 Chip ທີ່ມີຕົວກັ່ນຕອງການກັ່ນຕອງ Kalman ທີ່ມີການຊື້ຂໍ້ມູນຈາກແກັບ gyroscope ແລະ Accelerometer ແລະການປຸງແຕ່ງຜົນຜະລິດ.ຄຸນນະສົມບັດນີ້ຫຼຸດຜ່ອນວຽກງານຂອງ miciprocessor ທີ່ມີສ່ວນປະກອບຢ່າງຫຼວງຫຼາຍແລະຫລີກລ້ຽງການກັ່ນຕອງທີ່ຫນ້າເບື່ອຫນ່າຍແລະຂະບວນການ Fusion Discus.
ຫມາຍເຫດ:
ການຕັດສິນໃຈ: ການຕັດສິນລະດັບການຕັດສິນໃຈແບບງ່າຍດາຍ.ຕົວເລກທີ່ສັບສົນແມ່ນປະກອບດ້ວຍຕົວເລກທີ່ແທ້ຈິງບວກກັບຫົວຫນ່ວຍຈິນຕະນາການທີ່ຂ້ອຍ, ບ່ອນທີ່ຂ້ອຍ ^ 2 = -1.
MPU-6050 ຢູ່ໃສ?
- ຂອງຫຼິ້ນ
- ມືຖືແລະການຫຼີ້ນເກມ Portable Gaming
- ຜູ້ຄວບຄຸມເກມທີ່ອີງໃສ່ການເຄື່ອນໄຫວ
- Blourfree ™ເຕັກໂນໂລຢີ (ສໍາລັບວິດີໂອ / ຍັງຄົງສະຖຽນລະພາບຂອງຮູບພາບ)
- ເຕັກໂນໂລຢີ Airsign ™ (ສໍາລັບຄວາມປອດໄພ / ການກວດສອບຄວາມຖືກຕ້ອງ)
- Instestures ການຮັບຮູ້ດ້ານຮ່າງກາຍ
- ເຊັນເຊີທີ່ຍັງ wearable ສໍາລັບສຸຂະພາບ, ການສອດຄ່ອງກັບແລະກິລາ
- ເກມທີ່ເປີດໃຊ້ງານແລະການນໍາໃຊ້ແລະກອບຄໍາຮ້ອງສະຫມັກ
- motioncommand ™ເຕັກໂນໂລຢີ (ສໍາລັບການຕັດສະແດງທ່າທາງສັ້ນ)
- ການບໍລິການທີ່ອີງໃສ່ສະຖານທີ່, ຈຸດທີ່ສົນໃຈ, ແລະການຄິດໄລ່ຕາຍ
- ການຄວບຄຸມໄລຍະໄກ 3D ສໍາລັບ DTV ທີ່ເຊື່ອມຕໍ່ອິນເຕີເນັດແລະກໍານົດກ່ອງເທິງ, ຫນູ 3D
- Touchany Toolsy ™ເຕັກໂນໂລຢີ (ສໍາລັບ "ບໍ່ສໍາພັດ" UI ການຄວບຄຸມ UI
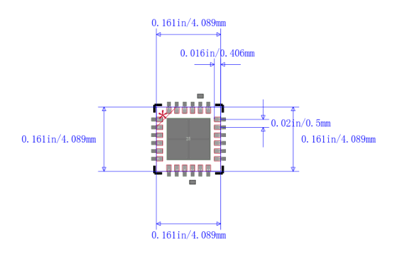
ຊຸດຂອງ MPU-6050
ວິທີການຫຼຸດຜ່ອນສຽງຂອງ MPU-6050?
ພວກເຮົາສາມາດເອົາວິທີການດັ່ງຕໍ່ໄປນີ້ເພື່ອຫຼຸດຜ່ອນສຽງຂອງ MPU-6050.
ໃຊ້ເຊັນເຊີທີ່ຕອບແທນ
Caliborter ຂອງ accelorometer ແລະ gyroscope ຂອງ MPU-6050 ສາມາດກໍາຈັດຄວາມລໍາອຽງແລະຄວາມຜິດພາດຂອງເຊັນເຊີຕົວເອງ, ດັ່ງນັ້ນການຫຼຸດຜ່ອນຜົນຂອງສິ່ງລົບກວນ.ຂະບວນການສອບທຽບມັກຈະປະກອບດ້ວຍສອງໄລຍະ: ສະຖຽນລະພາບແລະການສອບທຽບ.
ຂະບວນການກັ່ນຕອງຮາດແວ
ການເພີ່ມເຄື່ອງກອງຕົວກອງໄປຍັງເສັ້ນພະລັງງານຂອງ MPU-6050 ສາມາດຫຼຸດຜ່ອນຜົນກະທົບຂອງສິ່ງລົບກວນການສະຫນອງໄຟຟ້າໃນເຊັນເຊີ.ໃນຂະນະດຽວກັນ, ໃນການຈັດແຈງ PCB, ພວກເຮົາຄວນພະຍາຍາມຮັກສາ MPU-6050 ຫ່າງຈາກແຫຼ່ງທີ່ມີຄວາມແຮງສູງແລະສ່ວນປະກອບທີ່ມີຄວາມຖີ່ສູງແລະສ່ວນປະກອບທີ່ມີຄວາມຖີ່ສູງ.
ການປຸງແຕ່ງການກັ່ນຕອງຊອບແວ
ຫຼັງຈາກເກັບກໍາຂໍ້ມູນດິບຈາກ MPU-6050, ພວກເຮົາສາມາດເພີ່ມລິ້ງການກັ່ນຕອງຊອບແວເພື່ອປະມວນຜົນຂໍ້ມູນເບື້ອງຕົ້ນເພື່ອກໍາຈັດການແຊກແຊງທີ່ແປກປະຫຼາດ.ວິທີການກັ່ນຕອງຊອບແວທີ່ໃຊ້ໄດ້ຖືກນໍາໃຊ້ລວມມີການກັ່ນຕອງ, ການກັ່ນຕອງແບບປານກາງ, ການກັ່ນຕອງ Kalman ແລະອື່ນໆ.
ໃຊ້ຕົວກອງຜ່ານພາຍໃນ
MPU-6050 ມີຕົວກອງຜ່ານທີ່ມີລາຍລະອຽດຕ່ໍາແບບດິຈິຕອລທີ່ມີການປະສົມປະສານພາຍໃນ, ເຊິ່ງສາມາດໃຊ້ເພື່ອຫຼຸດຜ່ອນສຽງດັງທີ່ມີຄວາມຖີ່ສູງໂດຍການຕັ້ງຄວາມຖີ່ຂອງການຕັດຂອງມັນ.ໂດຍສະເພາະ, ພວກເຮົາສາມາດກໍານົດຄວາມຖີ່ຂອງການຕັດຂອງຕົວກອງໂດຍການປັບປຸງການລົງທະບຽນ config ຂອງ MPU-6050 ເພື່ອກໍາຈັດສິ່ງລົບກວນທີ່ມີຄວາມຖີ່ສູງທີ່ເກີດຈາກການເກັບຕົວຢ່າງທີ່ມີຄວາມຖີ່ສູງ.
ການຄິດໄລ່ tejectory mpu-6050 ອີງໃສ່
MPU-6050 ແມ່ນ solderor pyroscoRopeter ຫົກແກນທີ່ສາມາດໃຊ້ເພື່ອວັດແທກການເຄື່ອນໄຫວແລະທັດສະນະຄະຕິຂອງວັດຖຸ.ການຄິດໄລ່ເສັ້ນທາງການເຄື່ອນໄຫວໂດຍອີງໃສ່ MPU-6050 ສາມາດຮັບຮູ້ໄດ້ໂດຍຂັ້ນຕອນຕໍ່ໄປນີ້:
ຂັ້ນຕອນທໍາອິດແມ່ນອ່ານຂໍ້ມູນເຊັນເຊີ.ພວກເຮົາຈໍາເປັນຕ້ອງອ່ານຂໍ້ມູນ Accelerometer ແລະ Gyroscope ຈາກ Sensors MPU-6050 ໂດຍໃຊ້ drivers ທີ່ເຫມາະສົມແລະຫນ້າທີ່ຫ້ອງສະມຸດ.ຂໍ້ມູນເຫຼົ່ານີ້ມັກຈະມີຜົນຜະລິດໃນຮູບແບບດິຈິຕອລ, ສະນັ້ນບາງວຽກການປ່ຽນໃຈເຫລື້ອມໃສແລະການສອບທຽບທີ່ຈໍາເປັນຕ້ອງປ່ຽນພວກມັນໄປໃນການວັດແທກຕົວຈິງ.
ຂັ້ນຕອນທີສອງແມ່ນການຄິດໄລ່ການເລັ່ງ.ຫນ້າທໍາອິດ, ພວກເຮົາຕ້ອງການປຸງແຕ່ງຂໍ້ມູນຈາກ accelerometeter ເພື່ອເລີ່ມຕົ້ນເລັ່ງຂອງວັດຖຸໃນແຕ່ລະແກນ.ຕໍ່ມາ, ເພື່ອຄິດໄລ່ຄວາມໄວແລະການຍ້າຍຂອງວັດຖຸໃນແຕ່ລະແກນ, ພວກເຮົາຈໍາເປັນຕ້ອງລວມເອົາຂໍ້ມູນການເລັ່ງ.ເຕັກນິກການເຊື່ອມໂຍງຕົວເລກ, ເຊັ່ນ: ວິທີການຂອງ Euler ຫຼືວິທີການຂອງຊາວອີຕິນ, ມັກຖືກນໍາໃຊ້ໃນຂະບວນການນີ້ເພື່ອຮັບປະກັນຄວາມຖືກຕ້ອງຂອງການຄິດໄລ່ການຍ້າຍຖິ່ນຖານ.
ຂັ້ນຕອນທີສາມແມ່ນການຄິດໄລ່ຄວາມໄວເປັນລ່ຽມ.ໃຊ້ຂໍ້ມູນ gyroscope, ຄວາມໄວໃນມຸມຂອງວັດຖຸໃນແຕ່ລະແກນສາມາດຄິດໄລ່ໄດ້.ອີກເທື່ອຫນຶ່ງ, ຂໍ້ມູນນີ້ຈໍາເປັນຕ້ອງໄດ້ຮັບການວັດແທກແລະປ່ຽນໃຈເຫລື້ອມໃສເພື່ອໃຫ້ໄດ້ຄວາມໄວໃນຮູບຮ່າງໃນຫນ່ວຍກາຍຕົວຈິງ.
ຂັ້ນຕອນທີສີ່ແມ່ນການຄິດໄລ່ການຫມູນວຽນ.ໂດຍການປະສົມປະສານຂໍ້ມູນຄວາມໄວໃນມຸມ, ມຸມຂອງການຫມູນວຽນຂອງວັດຖຸໃນແຕ່ລະແກນສາມາດຄິດໄລ່ໄດ້.ສິ່ງນີ້ສາມາດເຮັດໄດ້ໂດຍໃຊ້ເຕັກນິກການເຊື່ອມໂຍງຕົວເລກເຊັ່ນ: ວິທີການຂອງ Euler ຫຼືວິທີການທີ່ມີອາຍຸຫລືວິທີການທີ່ຈະຄິດໄລ່ມຸມ.
ຂັ້ນຕອນທີຫ້າແມ່ນການລວມຂໍ້ມູນ.ພວກເຮົາສົມທົບຂໍ້ມູນຈາກ Acceleromometers ແລະ Gyrorocopes ທີ່ຈະໄດ້ຮັບທັດສະນະຄະຕິແລະຂໍ້ມູນຕໍາແຫນ່ງຂອງວັດຖຸ.ສິ່ງນີ້ສາມາດເຮັດໄດ້ໂດຍໃຊ້ລະບົບ algorithms ເຊັ່ນ: Solver Tolder ຂອງ Afler ຫຼື Ancelow.
ຂັ້ນຕອນທີຫົກແມ່ນການນຶກພາບຜົນໄດ້ຮັບ.ພວກເຮົາປ່ຽນເສັ້ນທາງເຄື່ອນທີ່ວັດຖຸທີ່ສົມບູນໃນຈຸດປະສານງານໃນລະບົບການປະສານງານ 3D ແລະສະແດງເຄື່ອງມືທີ່ເຫມາະສົມກັບການປ່ຽນແປງຂອງວັດຖຸແລະການປ່ຽນແປງທັດສະນະຄະຕິຂອງວັດຖຸ.
ຄໍາຖາມທີ່ມັກຖາມເລື້ອຍໆ [FAQ]
1. MPU6050 ເທົ່າໃດ?
ຜົນໄດ້ຮັບທີ່ໄດ້ມາສະແດງໃຫ້ເຫັນຄວາມຖືກຕ້ອງທີ່ພຽງພໍຂອງຫນ້ອຍກວ່າ 1% ແລະຄວາມຫນ້າເຊື່ອຖື, ຮັບປະກັນການຂະຫຍາຍຂອງ Shaft ຟແລະມາດຕະຖານສູງຂອງອຸດສາຫະກໍາຍົກ.
2. ວິທີການອ່ານຂໍ້ມູນຈາກ MPU6050?
ເພື່ອອ່ານຈົດທະບຽນ MPU6050 MPU6050 ໃຫ້ມີສະພາບການເລີ່ມຕົ້ນ, ຖັດມາແມ່ນທີ່ຢູ່ I2C ທາດແລະຫຼັງຈາກນັ້ນກໍ່ຈະຖືກອ່ານ.
3. MPU6050 ຢູ່ໃສ?
ໃນອຸປະກອນຕິດຕາມສຸຂະພາບ, ການຕິດຕາມການສອດຄ່ອງກັບ.ໃນ drones ແລະ quadcopters, MPU6050 ແມ່ນໃຊ້ເພື່ອຄວບຄຸມຕໍາແຫນ່ງ.ໃຊ້ໃນການຄວບຄຸມແຂນຫຸ່ນຍົນ.ອຸປະກອນຄວບຄຸມທ່າທາງມື.
4. ແມ່ນ MPU6050 IMU ບໍ?
AMPU6050 MMUS AMU AMU ອ່ານຂໍ້ມູນຈາກເຊັນເຊີ MPU-6050 ເຊັນເຊີທີ່ເຊື່ອມຕໍ່ກັບຮາດແວ.ຜົນຜະລິດທີ່ເລັ່ງດ່ວນ, ອັດຕາເປັນລ່ຽມ, ແລະອຸນຫະພູມຕາມແກນຂອງເຊັນເຊີ.
5. ການປຸງແຕ່ງ MPU6050 ແມ່ນຫຍັງ?
ນີ້ແມ່ນໂປເຊດເຊີ Onboard MPU6050 ທີ່ປະສົມປະສານຂໍ້ມູນທີ່ມາຈາກ Acceleromemeter ແລະ Gyroscope.DMP ແມ່ນກຸນແຈໃນການໃຊ້ MPU6050 ແລະຖືກອະທິບາຍຢ່າງລະອຽດໃນພາຍຫລັງ.ເຊັ່ນດຽວກັບທຸກ microprocessors ທີ່ DMP ຕ້ອງການ firmware ຕ້ອງການ.
ການທົດສອບການເຮັດວຽກ.ຜະລິດຕະພັນທີ່ມີຄ່າໃຊ້ຈ່າຍສູງທີ່ສຸດແລະການບໍລິການທີ່ດີທີ່ສຸດແມ່ນຄໍາຫມັ້ນສັນຍານິລັນດອນຂອງພວກເຮົາ.
ມາດຕາຮ້ອນ
- ແມ່ນ cr2032 ແລະ cr2016 inchangeable
- Mosfet: ນິຍາມ, ຫຼັກການເຮັດວຽກແລະການຄັດເລືອກ
- ການຕິດຕັ້ງແລະການທົດສອບການຕີຄວາມສ່ຽງ, ການຕີຄວາມຫມາຍຂອງແຜນວາດສາຍໄຟທີ່ Relay
- CR2016 ທຽບກັບ CR2032 ແມ່ນຫຍັງທີ່ແຕກຕ່າງ
- NPN vs. PNP: ແມ່ນຫຍັງທີ່ແຕກຕ່າງກັນ?
- ESP32 vs stm32: microcontroller ໃດທີ່ດີກວ່າສໍາລັບທ່ານ?
- ຄໍາແນະນໍາກ່ຽວກັບການປະຕິບັດການປະຕິບັດງານ LM358 ຄູ່ມື: ແຜນວາດ, ແຜນວາດ, ທຽບເທົ່າ, ຕົວຢ່າງທີ່ເປັນປະໂຫຍດ
- CR2032 vs DL2032 vs CR2025 ຄູ່ມືການປຽບທຽບ
- ເຂົ້າໃຈຄວາມແຕກຕ່າງຂອງ Esp32 ແລະ ESP32-S3 ການວິເຄາະດ້ານວິຊາການແລະການປະຕິບັດການວິເຄາະ
- ການວິເຄາະລະອຽດຂອງວົງຈອນ RC Series
 ຂຸດຄົ້ນຄວາມສາມາດແລະການນໍາໃຊ້ຂອງຊິບ NRF24L01 ການສື່ສານ
ຂຸດຄົ້ນຄວາມສາມາດແລະການນໍາໃຊ້ຂອງຊິບ NRF24L01 ການສື່ສານ
2024-04-25
 MMBT3904 NPN Transistor: ຂໍ້ສະເພາະຂອງມັນ, ຄູ່ມືການນໍາໃຊ້ທີ່ສົມບູນ, ແລະ MMBTHS3904 ທຽບ MMBT5551
MMBT3904 NPN Transistor: ຂໍ້ສະເພາະຂອງມັນ, ຄູ່ມືການນໍາໃຊ້ທີ່ສົມບູນ, ແລະ MMBTHS3904 ທຽບ MMBT5551
2024-04-25
ເລກຮ້ອນ
 C0402C0G1C910J
C0402C0G1C910J C4532JB1H685M250KA
C4532JB1H685M250KA GRM1885C1HR68CA01D
GRM1885C1HR68CA01D GCM1555C1H7R3DA16D
GCM1555C1H7R3DA16D 0805ZC105JAZ2A
0805ZC105JAZ2A 0805YA272J4T4A
0805YA272J4T4A UMK316BJ105MD-T
UMK316BJ105MD-T- 08053C184MAT2A
 06035A1R2DAT4A
06035A1R2DAT4A GRM2196P2A1R0CD01D
GRM2196P2A1R0CD01D
- TAP475M025SCS
- TPSV157K016R0045
- DLW5BSM302SQ2L
- 5SGXMA5N2F45C2N
- TJA1057GTJ
- QS3384PAG
- IS43LD16640A-25BLI
- EP1S30F1020I6
- VE-271-MW
- HG-C1200
- 6RI100G160
- TMS320VC5503PGE
- AM26LV32ID
- REG104GA-A
- LTC5532ES6#TRMPBF
- TLC27M4CNS
- T491C157M010ZTAU007280
- LP5907UVX-2.85/NOPB
- BD7959EFV-E2
- BQ20853DBT
- LMZ23605TZ
- M13S128324A-5B
- MB89935BPFV-G-120-
- NT5TU512T4BU-3C
- S99FL040A0043
- SMI4025CES
- STA509A
- 91CY22IFG-6HE2
- R5C843-CSP208P
- RV3110C-C1214-1.8-PF
- ST7285CQ6
- SVT-070-1
- TVP5145PFPG4
- ZR374050TQCG-D
- LM194H/883B
- CXD3197BGA-03-T6
- TSUMV36KE-LF
- MB4499LGA-G-ER
- B43456-S9758-M1